
自动驾驶系统采用先进的通信、计算机、网络和控制技术,实现对列车的实时连续控制。利用现代通信手段,直接面向列车,实现列车与地面的双向数据通信,传输速度快,信息量大。列车和控制中心的后续跟踪可以及时获取前进列车的准确位置,使运营管理更加灵活,控制更加有效,更适合列车自动驾驶的需要。

自动驾驶定义
编辑自动驾驶是指车辆基于自身设备感知和理解周围环境,根据用户需求自动规划行驶路线,控制自身动作,实现安全、舒适、高效的骑行体验的能力。自动驾驶是一个跨学科的领域,包括计算机技术、通信技术、信号处理技术、传感器技术等。
自动驾驶系统是指列车驾驶员工作完全自动化、高度集中的列车操作系统。自动驾驶系统具有列车自动唤醒启动与休眠、停车场自动进出、自动清洁、自动驾驶、自动停车、自动开门与关门、故障自动恢复等功能,具有常规运行、降级运行、运行中断等多种运行方式。实现全自动化操作可以节约能源,优化系统能耗与速度的合理匹配。
自动驾驶系统所要求的城市轨道交通具有高水平的互联性、安全性、快速性和舒适性。20世纪90年代以来,随着通信、控制和网络技术的发展,地面与列车之间可以实现大容量、双向信息传输,使高密度、大运量的地铁系统成为真正的驾驶驱动系统成为可能。
自动驾驶功能说明
编辑自动驾驶系统的主要功能是地面与列车之间的双向信息传递,以及运行组织的综合应急处理。列车地面信息传输通道是列车运行自动控制系统的重要组成部分。自动控制系统的车载设备完全依靠从地面控制中心接收到的列车控制指令来运行,实时监控列车的实际速度和地面允许的速度指令。当列车速度超过地面限速时,车载设备会实施制动,保证列车的安全运行。
自动驾驶系统实现了列车自动启动运行、车站定点停靠、全自动驾驶自动返程、车辆段自动进出等功能。同时对列车上的乘客、车厢和设备的状态进行监控和检测,对列车各系统进行自动诊断,将列车设备的状态和故障报警信息传输到控制中心,并对各种故障和事故进行分类,制定处置方案。
自动驾驶系统关键技术
编辑自动驾驶系统是一个集环境感知、决策控制和行动执行功能于一体的综合系统。它是一个充分考虑车辆与交通环境协调规划的系统,也是未来智能交通系统的重要组成部分。
自动驾驶系统通常分为几个层次,包括环境感知、决策规划和运动控制。感知层完成对车辆周围环境的感知识别,获取并处理环境信息。决策和规划层根据这些信息做出驾驶决策,规划驾驶路线。最后,运动控制层负责执行决策和控制车辆的运动。
感知层
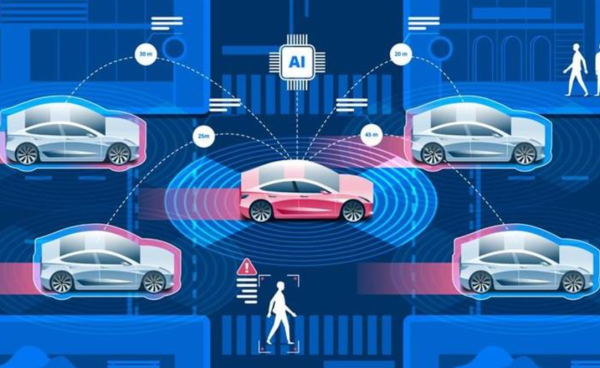
感知层定义为环境和车辆信息的采集和处理,涉及道路边界检测、车辆检测、行人检测等多种技术。它可以被认为是一种先进的传感器技术,使用激光雷达、摄像头、毫米波雷达、超声波雷达、速度和加速度传感器等传感器。由于单一传感器感知的局限性,无法满足各种工况下的精确感知。自动驾驶汽车要实现在各种环境下的平稳运行,需要采用多传感器融合技术,这也是感知层的关键技术。
决策层
决策层可以理解为根据感知信息进行决策,确定合适的工作模型,制定相应的控制策略,代替人类驾驶员进行驾驶决策。这部分的功能类似于给自动驾驶汽车分配相应的任务。例如,在车道保持、车道偏离预警、距离保持、障碍预警等系统中,需要预测未来遇到的车辆与其他车辆、车道、行人等的状态。高级决策理论包括模糊推理、强化学习、神经网络和贝叶斯网络技术。由于人类在驾驶过程中所面临的路况和场景的多样性,以及个体针对不同情况所采取的不同驾驶策略,类人驾驶决策算法的优化需要非常全面和高效的人工智能模型以及大量的有效数据。这些数据需要尽可能地覆盖各种罕见的路况,这也是驾驶决策发展的最大瓶颈。
控制层
执行层是指在做出决策后,基于决策结果对车辆进行控制的系统。车辆的各种控制系统需要能够通过总线与决策系统连接,根据决策系统发出的总线指令,精确控制加速、制动、转向幅度、灯光控制等驾驶动作,实现车辆的自动驾驶。
通信控制选择
编辑在城市轨道交通领域,分为列车自动控制系统和车基信号控制系统两大部分,包括列车自动监控子系统(ATS)、列车自动保护系统(ATP)、列车自动运行子系统(ATO)、联锁子系统、维护监控子系统、DCS子系统设备等。各系统设备通过信息交换网络形成闭环系统,列车与地面之间采用双向数据通信。列车动态更新位置信息和运行授权信息,计算列车运行速度曲线,实现列车跟踪运行和精确定位停车。主要用于列车路线控制、列车间隔控制、调度指挥、信息管理、设备状态监测和维修管理。
自动驾驶发展前景
编辑从技术层面来看,自动驾驶系统包括多个关键组件,如车载传感器(如摄像头、激光雷达、毫米波雷达等)、高精度地图、定位系统等。这些组件协同工作,以实现对车辆状态和周围环境的精确感知,从而进行安全、高效的自动驾驶。
自动驾驶系统的发展可以分为多个层次或级别。从最基础的驾驶辅助系统,到部分自动化系统,再到高度自动化系统,最终发展到完全自动化系统。每个层次都在逐步提高自动驾驶的能力,减少对人类驾驶员的依赖。
自动驾驶系统的应用前景广阔,不仅可以提高道路交通安全,减少交通事故,还可以改善交通拥堵状况,提高出行效率。然而,自动驾驶技术的发展也面临着一些挑战,如技术成熟度、法规制定、伦理问题等。因此,在推进自动驾驶系统的应用过程中,需要综合考虑技术、法规、安全等多方面因素,确保自动驾驶技术的健康、有序发展。
内容由suifeng提供,本内容不代表globalbaike.com立场,内容投诉举报请联系全球百科客服。如若转载,请注明出处:https://globalbaike.com/980/